
Strategic Research Program Exercise and the Brain in Health & Disease: The Added Value of Human-Centered Robotics
Leden
- Human Physiology and Sports Physiotherapy (MFYS): Kevin De Pauw, Bart Roelands
- Robotics & MultiBody Mechanics Research Group (R&MM): Bram Vanderborght, Tom Verstraten, Greet Van de Perre
Onderzoeksdomeinen
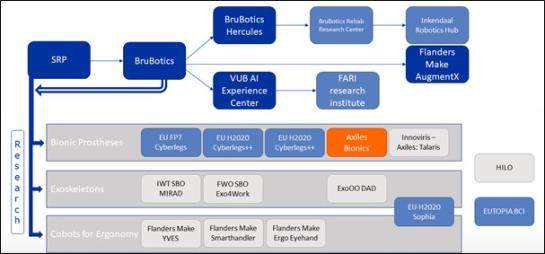
- Exoskeletons
- Prosthesen
- Cobots
- Brain-computer interface (BCI)
- Human-in-the-loop control (HILO)
- Projecten, diensten aan derden (DAD), initiatieven & laboratoria
Achtergrond
Het SRP17 is een uniek strategisch onderzoeksprogramma dat fundamenteel en strategisch onderzoek combineert met toepassingsgericht onderzoek naar valorisatie, revalidatie en industrie. Een van de kernbegrippen is mens-robot interactie, waarbij een mensgericht ontwerp essentieel is en wordt bereikt door de uitgebreide samenwerking tussen robotica-ingenieurs en menselijke bewegingswetenschappers. De belangrijkste onderzoeksfocus ligt op gemotoriseerde protheses voor mensen met een amputatie aan de onderste ledematen, industriële rug- en schouderexoskeletten, industriële cobots, multi-agent teams, brein-computer-interfacetoepassingen en human-in-the-loop regelsystemen.
Het iteratieve proces van het herontwerpen van prototypes naar marktbestendige producten gaat gepaard met grondige validatie- en evaluatieprocessen waarin fysieke inspanning en cognitieve belasting worden onderzocht in termen van biomechanische, fysiologische, sociale en subjectieve metingen. Bewegingswetenschappers verzamelen, analyseren en interpreteren deze gegevens in nauwe samenwerking met ingenieurs, die zich richten op de ontwikkeling en validatie van de robotica in termen van robuustheid en functionaliteit met behulp van mechatronische testbanken, en integreren de bevindingen van de bewegingswetenschappers. Mensgerichte robotica wordt alleen bereikt als de mechatronica wordt aangepast. Dit maatwerk wordt bereikt door elektrofysiologische metingen vanuit de hersenen (brain-computer interface) en de periferie (human-in-the-loop optimalisatiestrategieën) in contact te brengen met het robotische apparaat.
Naast productaanpassing zijn verschillende valorisatiestrategieën en benchmarkingactiviteiten essentieel om effectieve en grootschalige toepassing door eindgebruikers mogelijk te maken. Zowel patiënten als gezonde individuen zijn het doelwit en het belangrijkste doel is om de levenskwaliteit van alle individuen te verbeteren. Blessurepreventie en de preventie van fysieke en/of mentale vermoeidheid zijn doelgroepen in de sport, industrie en revalidatie. Het brede scala aan onderzoeksactiviteiten, robotica modules en doelgroepen benadrukken het belang van dit programma voor de maatschappij en economie.
Meer informatie: Kevin.De.Pauw@vub.be
Belangrijkste wetenschappelijk peer-reviewed output
- Elprama AS, Vannieuwenhuyze J, De Bock S, Vanderborght B, De Pauw K, Meeusen R, Jacobs A. What determines industrial workers’ intention to use exoskeletons? Human Factors 2020; 62(3): 337-350.
- Tassignon B, Verschueren J, De Pauw K, Roelands B, Van Cutsem J, Verhagen E, Meeusen R. Mental fatigue impairs clinician-friendly balance performance and brain activity. Translational Sports Medicine 2020; 6(3): 616-625.
- Tassignon B, Verschueren J, De Pauw K, Verhagen E, Meeusen R. Acute physical fatigue alters brain activity and impairs reactive balance test performance. Translational Sports Medicine 2021; 4(4): 488-499.
- Proost M, Habay J, De Wachter J, De Pauw K, Rattray B, Meeusen R, Roelands B, Van Cutsem J. How to tacke mental fatigue: A systematic review on potential countermeasures and their underlying mechanisms. Sports Medicine 2022.
- De Bock S, Ampe T, Rossini M, Tassignon B, Lefeber D, Guerrero CR, Roelands B, Geeroms J, Meeusen R, De Pauw K. Passive shoulder exoskeleton partially mitigates fatigue-induced effects in overhead work. Applied Ergonomics 2022.
- Diaz MA, Voss M, Dillen A, Tassignon B, Flynn L, Geeroms J, Meeusen R, Verstraten T, Babic J, Beckerle P, De Pauw K. Human-in-the-loop optimization of assistive robotics devices to improve human robot interaction: A systematic review. IEEE Transactions on Cybernetics 2022.
- Lathouwers E, Dillen A, Diaz MA, Tassignon B, Verschueren J, Verté D, De Witte N, De Pauw K. Characterizing fall risk factors in Belgian older adults: A data-drive approach. Journal BMC Public Health 2022.
- Maricot A, Dick E, Walravens A, Pluym B, Lathouwers E, De Pauw K, Verschueren J, Roelands B, Meeusen R, Tassignon B. Brain neuroplasticity related to ligamentous ankle injuries: A systematic review. Sports Medicine 2023.
- Maricot A, Lathouwers E, Verschueren J, De Pauw K, Meeusen R, Roelands B, Tassignon B. Test-retest, intra- and inter-rater reliability of the reactive balance test in patients with chronic ankle instability. Submitted to Frontiers 2024.
- Maricot A, Corluy HC, De Pauw K, Lathouwers E, Meeusen R, Roelands B, Verschueren J, Tassignon B. Deficits in neurocognitive performance in patients with chronic ankle instability during a neurocognitive balance task – A balance retrospective case-control study. Physical Therapy in Sport 2023.
- Lathouwers E, Diaz MA, Maricot A, Tassignon B, Cherelle C, Cherelle P, Meeusen R, De Pauw K. Therapeutic benefits of lower limb prostheses: A systematic review. Journal of NeuroEngineering and Rehabilitation 2023.
- Lathouwers E, Baeyens J-P, Tassignon B, Cherelle P, Meeusen R, De Pauw K. Coordination patterns of walking with an articulated passive ankle-foot prosthesis: An explorative case-control study. BioMedical Engineering OnLine 2023.
- Govaerts R, De Bock S, Stas L, El Makrini I, Habay J, Van Cutsem J, Roelands B, Vanderborght B, Meeusen R, De Pauw K. Work performance in industry: The impact of mental fatigue and a back exoskeleton on work efficiency. Applied Ergonomics 2023.
- Govaerts R, De Bock S, Provyn S, Vanderborght B, Roelands B, Meeusen R, De Pauw K. The impact of an active and passive industrial back exoskeleton on functional performance. Ergonomics 2023.
- Govaerts R, Turcksin T, Vanderborght B, Roelands B, Meeusen R, De Pauw K, De Bock S. Evaluating cognitive and physical work performance: A comparative study of an active and passive industrial back exoskeleton. Wearable Technologies 2023
- Habay J, Uylenbroeck R, Van Droogenbroeck R, De Wachter J, Proost M, Tassignon B, De Pauw K, Meeusen R, Pattyn N, Van Cutsem J, Roelands B. Interindividual variability in mental fatigue-related impairments in endurance performance: A systematic review and multiple meta-regression. Sports Medicine - Open 2023.; 9: 14.
- Elprama SA, De Bock S, Meeusen R, De Pauw K, Vandeborght B, Jacobs A. Design and implementation requirements for increased acceptance of occupational exoskeletons in an industrial context: A mixed methods study. Accepted in International Journal of Human-Computer Interaction 2023.
- Dillen A, Fakhreddine G, Romain O, Marusic U, Grospretre S, Vanderborght B, Nowé A, Meeusen R, De Pauw K. Optimal sensor set for decoding motor imagery from EEG. Applied Sciences 2023.
- Elprama S, De Bock S, Meeusen R, De Pauw K, Vanderborght B, Jacobs A. Design and implementation requirements for increased acceptance of occupational exoskeletons in an industrial context: A qualitative study. International Journal of Human-Computer Interaction 2023.
- Proost M, Habay J, De Wachter J, De Pauw K, Marusic U, Meeusen R, De Bock S, Roelands B, Van Cutsem J. The impact of mental fatigue on strength endurance task; Is there a role for the movement-related cortical potential? Submitted to Medicine & Science in Sports & Exercise 2023.